|
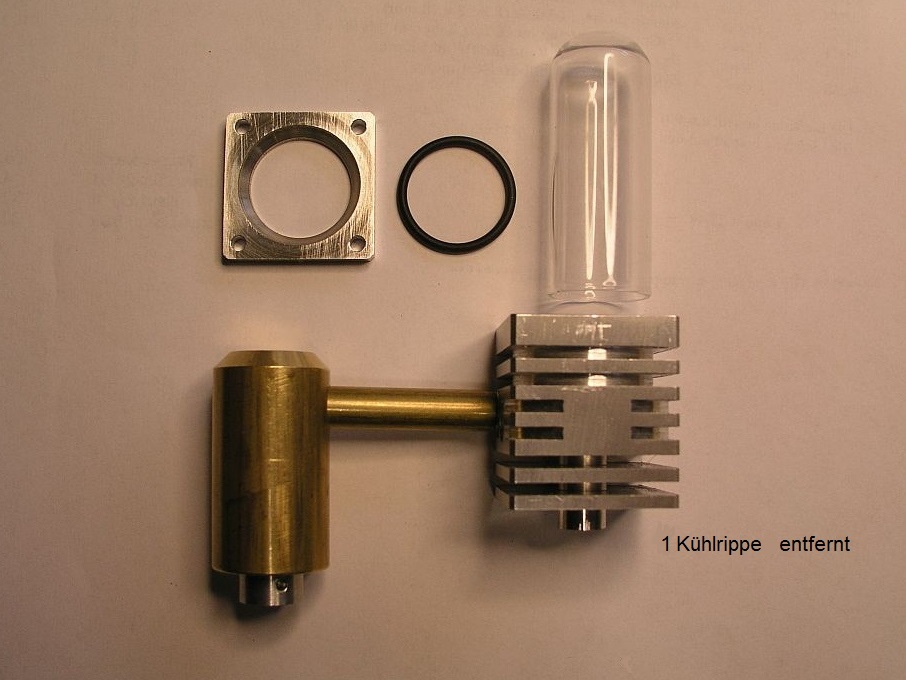
Obwohl ich mich ausreichend mit den verschiedenen Typen von Heißluft- bzw. Stirlingmotoren beschäftigt und sie auch gebaut habe, reizte es mich, den Gammastirling mit einer Ross-Yoke-Steuerung zu realisieren. Auch hier habe ich wieder auf bewährte Bauteile von Opitec zurückgegriffen, nämlich Arbeitszylinder mit Kolben, sowie Verdrängerkühler mit Glaszylinder, Flansch und O-Ring ( Kosten dieser Teile ca. 32 Euro). Arbeitszylinder und Verdrängerkühler werden mit einem sehr kurzen Verbindungsrohr unmittelbar miteinander verbunden, damit die Ross-Yoke-Steuerung kompakt ausgeführt werden kann. Abstand Pleuel-Arbeitskolben zu Pleuel-Verdränger ca. 26 mm.
Die Ross-Yoke-Steuerung ( yoke-drive mechanisme) ist mathematisch zwar
hinlänglich bekannt, allerdings hat sie Andy Ross 1976 erstmals in
einem Stirlingmotor erfolgreich eingesetzt. Sie bietet die Möglichkeit
den Stirlingmotor kompakter aufzubauen und das wollte ich mal ausprobieren.
Die Ross-Yoke-Steuerung kommt zum Einsatz, wenn Arbeits- und Verdrängerzylinder
senkrecht oder waagerecht in einer Linie dicht beieinander liegen, Hier
ist die Phasenverschiebung von 90° mit der üblichen Mechanik kaum
zu realisieren. Ein weiterer Vorteil dieser Steuerung ist die lineare Führung
der Pleuel von Arbeitskolben und Verdränger und damit fallen keine
Querkräfte an. Nur ist die lineare Führung des Yoke-Dreiecks
mit einem Schlitten nicht gerade reibungsarm zu realisieren.
Daher wird die Führung vorwiegend über ein Gelenk ausgeführt.
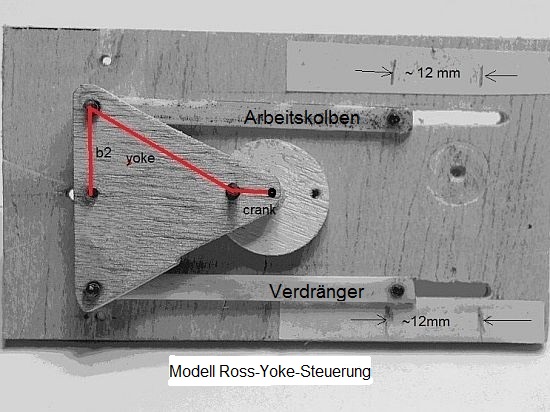
Bei meinem Modell, das der späteren Ausführung in den Abmessungen sehr ähnlich sein wird, ergibt die Berechnung mit den Daten: yoke = 23 mm
Somit liegt der Hub bei ca. 12,3 mm, d.h. Theorie und Praxis passen.
Der Hub für den Arbeitskolben und Verdränger ist nur dann gleich,
wenn das Yoke-Dreieck geradlinig geführt wird. Erfolgt die Führung
außerhalb über einen Gelenk, dann führt das Dreieck zusätzlich
eine Kreisbewegung aus. Das führt dazu, dass die Hübe unterschiedlich
sind, je nachdem auf welcher Seite vom Dreieck das Gelenk angebracht ist.
Wird das Gelenk oberhalb des Arbeitskolben angebracht, dann ist der Hub
des Verdrängers größer als der des Arbeitskolbens. Umgekehrt
gilt das entsprechende für Arbeitskolben und Verdränger. Das
mag nützlich sein, wenn tatsächlich die Hübe unterschiedlich
sein sollen. Allerdings gibt es jetzt Querkräfte auf Arbeitskolben
und Verdränger (siehe oben).
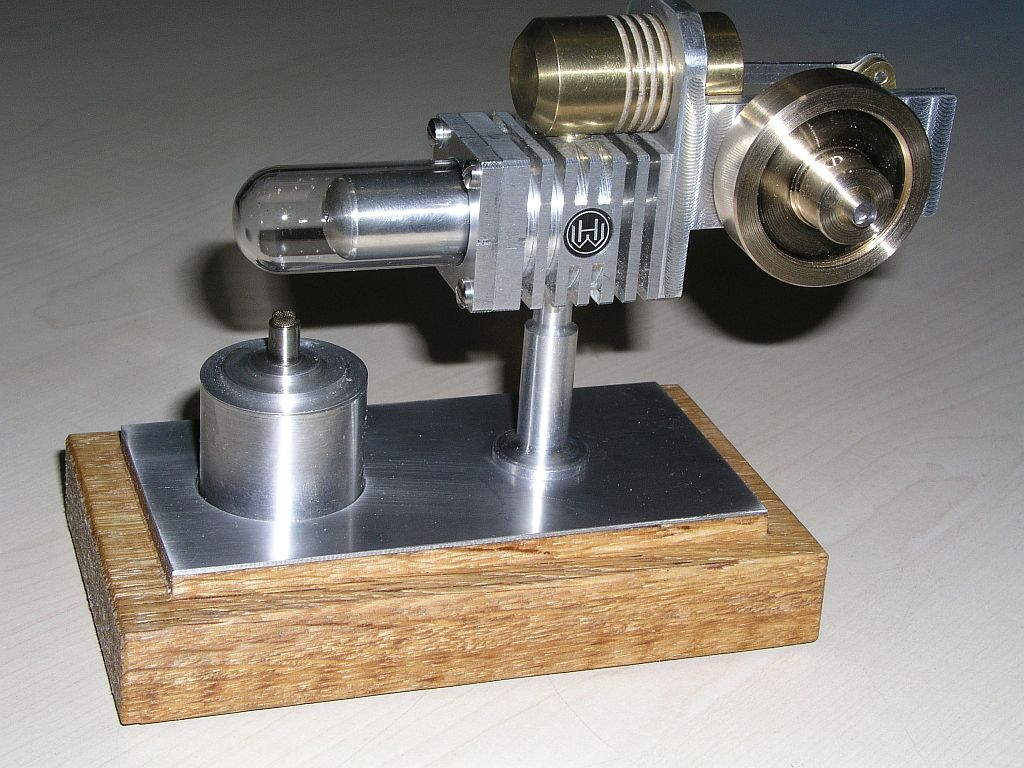
Wer mal schnell mit verschiedenen Parametern den Hub ausrechnen will, für den möge die Yoke-Excel-Tabelle hilfreich sein. Anmerkung zur Phasenverschiebung bei der Ross-Yoke-Steuerung: Beim obigen Dreieck ist die Phasenverschiebung ca. 90°. Wird der Abstand crank zur Grundlinie des Dreiecks verringert, dann erhöht sich die Phasenverschiebung. Das ist z.B. für den Alpha-Stirling wichtig, da hier die Phasenverschiebung mehr als 90° Grad betragen soll (Richtwert ca. 120°). Der Motor wird auf einem Alu-Winkel 60x30x4 mm aufgebaut und wird ungefähr so aussehen mit einem Säulenfuß im Verdrängerkühlkörper:
Um ein Gefühl für den Hub (crank-Bohrung), die Abmessungen
für das Yoke-Dreieck und die Pleuellängen zu bekommen,
habe ich erst einmal mit meinen Holzmodell getestet.. Das hilft mir sehr
bei der endgültigen Anfertigung der Teile in Metall und erspart unnötigen
Frust. So vorzugehen, kann ich nur jedem Nachbauer empfehlen.
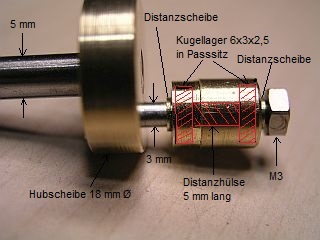
Also, man nehme eine Aluröhre 18 mm außen und 15 mm innen, drehe die Röhre innen auf 15,6-15,8 mm aus und fertige aus Rundholz einen Stab, der stramm in die Röhre passt. So läßt sich die Aluröhre außen auf 16 mm runterdrehen. Falls die Aluröhre beim Drehen nicht genug klemmen sollte, einfach mit Sekundenkleber fixieren. Die fertige Röhre läßt sich nach Erhitzen vom Holz streifen. Jetzt noch Deckel hinten und vorne drehen, fertig. Übrigens.., der Deckel vorne ist nicht notwendig. Der Motor funktioniert genauso gut auch ohne! Das gilt aber nur für unsere Modellmotoren, die nicht aufgeladen sind. Das scheinbar größere Gesamtvolumen hat wenig Einfluss auf das zu verschiebende Volumen in Verdrängerzylinder, da die Luft im offenen Verdrängerkolben kaum mit ausgetauscht wird. Etwas schwieriger ist die Herstellung des crank-Lagers. Damit das darin
aufgenommene Yoke-Dreieck nicht schlackert muß eine Hülse mit
Paßsitz für zwei Kugellager und dazwischen ein Distanzstück
angefertigt werden. In die Hubscheibe ist eine 3 mm Achse mit Gewinde mit
Loctite 648 " Fügen Welle Nabe" eingeklebt. Ebenso sind die Kugellager
in der Hülse mit Loctite fixiert Das ganze Gebilde muss so dimensioniert
sein, dass es später mit dem Yoke-Dreieck pressgenau auf die Hubscheibe
aufgeschraubt werden kann. Druck darf nur über kleine Distanzscheiben
auf den inneren Kranz der Kugellager ausgeübt werden, nur so ist die
Beweglichkeit der Kugellager und des Yoke Dreiecks gesichert. Das Yoke-Dreieck
wird auch mit Loctite auf dem crank-Lager fixiert. Die Anfertigung des
Yoke-Dreiecks ist ohne CNC-Fräse aufwändig. Also mit Laubsäge
aussägen und nachfeilen.
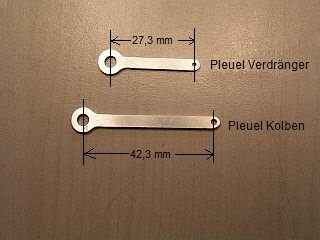
Anhand von Pleueln aus Holz ermittle ich die endgültigen Maße
für die Pleuel aus Alu, wichtig ist der Abstand Auge zu Auge des jeweiligen
Pleuels. Das Schwungrad ist ebenfalls doppelt kugelgelagert.
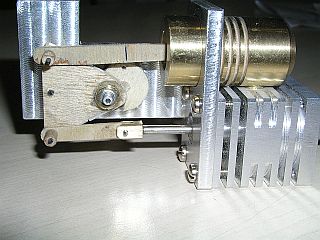
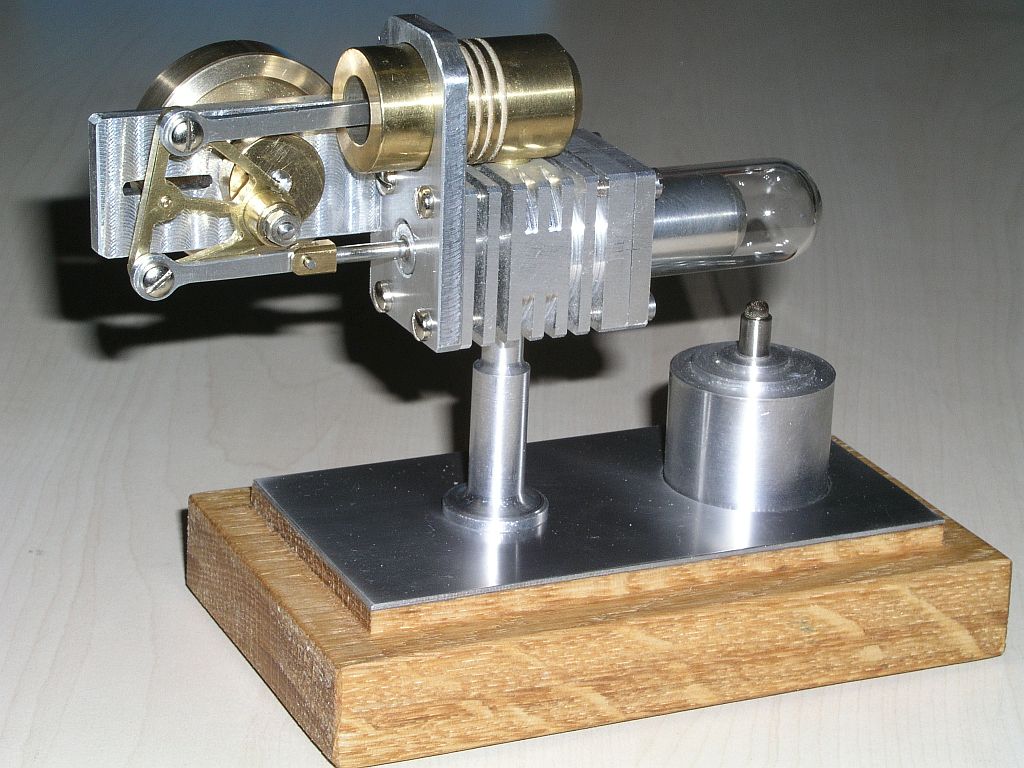
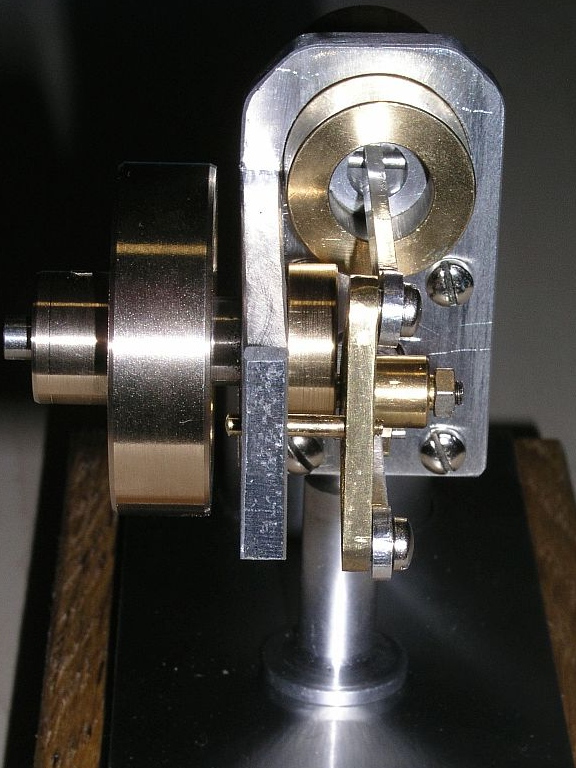
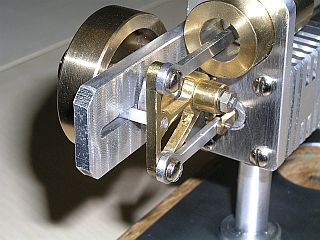
Änderungen und Verbesserungen am Motor: Ursache für die zu großen Laufgeräusche ist die Führung des Yoke-Dreiecks durch einen 2 mm Messingstift. Durch die Antriebskräfte des Arbeitskolbens wird der Messingstift belastet und nützt sich beidseitig im Schlitz ab. Dadurch entsteht mehr Spiel. Ich habe den Schlitz auf 3 mm Breite vergrößert und den Messingstift durch Rundmaterial aus Teflon spielfrei ersetzt, den Führungsschlitz sauber geschliffen und mit Silikonfett geschmiert. Den Mittelteil des Ross-Dreiecks habe ich entfernt, der ist bei stabiler Messingausführung nicht nötig. Der "Türbogen" über dem Arbeitszylinder wurde ebenfalls ersatzlos gestrichen.
Die Laufgeräusche sind erheblich reduziert, die Reibung ist geringer,
die Drehzahl hat sich auf 1800 U/min. erhöht. Jetzt hoffe ich, daß
sich die Kombination Teflon auf Alu bezüglich des Abriebes bewährt.
Wenn nicht, dann muss letztlich doch das Gelenk eingebaut werden.
|







{kind=link}